















Lenksteuerung
HCB-SCB (Steering Control Basic)
Die Lenksteuerung stellt ein universelles Lenksystem für eine Achse mit zwei Rädern zur Verfügung. Über CAN-Bus können mehrere Steuerungen miteinander kommunizieren, so dass bis zu 4 Achsen gelenkt werden können.
Ein- und Ausgänge:
- Digitaleingänge, parametrierbar als Freigabe, Ackermann-Algorithmus, Hundegang, Spurfolge, Geradeauslauf, Fahrtrichtungsumkehr
- Frequenzeingang für die Fahrgeschwindigkeit (alternativ über CAN-Bus)
- Frequenzeingänge, die als Drehgeber für ein Lenkrad (mit Drehgeberausgang) ausgewertet werden
- Analoge Eingänge für Soll-Lenkwinkel, Ist-Lenkwinkel links, Ist-Lenkwinkel rechts
- Proportionalausgänge mit Stromrückmessung zur Ansteuerung der Lenkzylinder
- Statusausgänge, alternativ nutzbar zur Anzeige von Fehler, Endanschlag links oder rechts, Geradeausstellung

Ausführliche Informationen
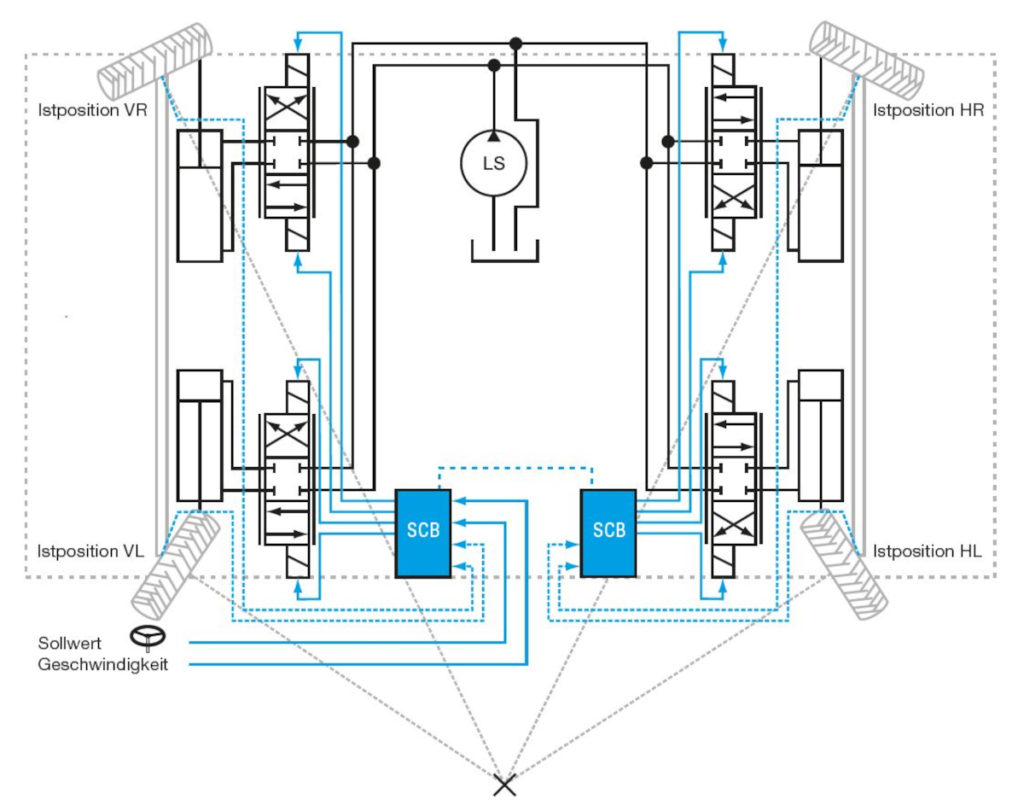
Die Lenksteuerung stellt ein universelles Lenksystem für eine Achse mit zwei Rädern zur Verfügung. Über CAN-Bus können mehrere Steuerungen miteinander kommunizieren, so dass bis zu 4 Achsen gelenkt werden können.
Die Lenksollwert-Vorgabe kann über inkrementelle Drehgeber (elektronisches Lenkrad), absolute Drehgeber (Sollwert aus Vorderachse oder Deichsel), per Joystick oder über Digitaleingänge erfolgen.
Mögliche erweiterte Funktionen
- Lenken mit dem Ackermann-Algorithmus, bei dem alle Räder tangential um einen Kreismittelpunkt positioniert werden
- Hundegang, bei dem alle Räder parallel verstellt werden, um das Fahrzeug seitwärts zu versetzen
- Spurfolgefunktionen, bei dem alle Räder zum Boden schonenden Fahren die gleiche Spur benutzen
- Geschwindigkeitsabhängiges Begrenzen des Lenkwinkels
- Umschaltbares Lenken: Nur Vorderachse oder nur Hinterachse
Ein- und Ausgänge
- Digitaleingänge, parametrierbar als Freigabe, Ackermann-Algorithmus, Hundegang, Spurfolge, Geradeauslauf, Fahrtrichtungsumkehr
- Frequenzeingang für die Fahrgeschwindigkeit (alternativ über CAN-Bus)
- Frequenzeingänge, die als Drehgeber für ein Lenkrad (mit Drehgeberausgang) ausgewertet werden
- Analoge Eingänge für Soll-Lenkwinkel, Ist-Lenkwinkel links, Ist-Lenkwinkel rechts
- Proportionalausgänge mit Stromrückmessung zur Ansteuerung der Lenkzylinder
- Statusausgänge, alternativ nutzbar zur Anzeige von Fehler, Endanschlag links oder rechts, Geradeausstellung
Steuergerät: HCB / Applikation: SCB (Steering Control Basic)

Was können wir für Sie tun?
Nehmen Sie Kontakt auf

Hendrik von Appen Dipl.-Ing.
Tel. +49 2534 9731-501
Mobil +49 151 67772904
vonAppen@voelkel.de
Völkel Mikroelektronik GmbH
Otto-Hahn-Straße 30
48161 Münster